
右手系 左手系 変換
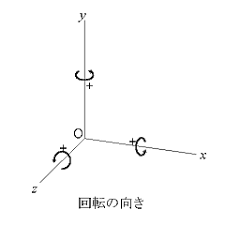
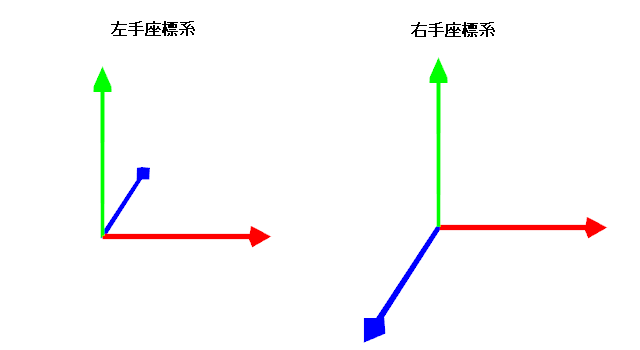
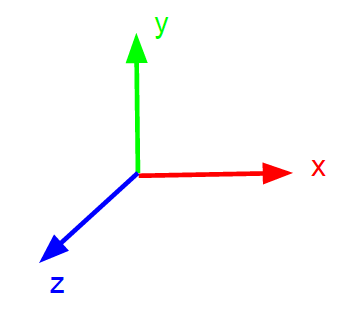
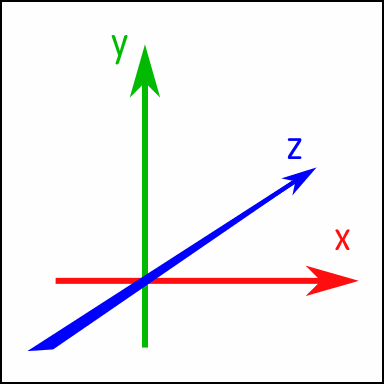
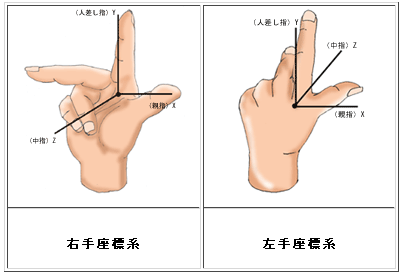
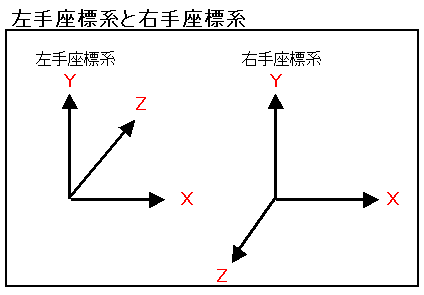
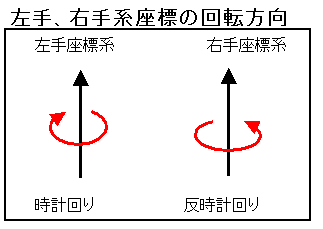
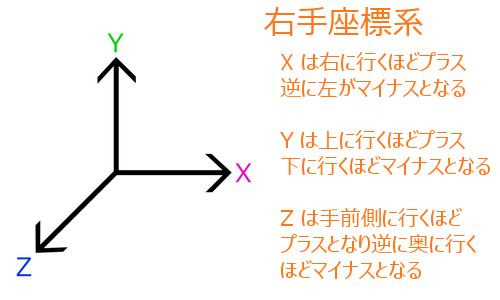
「右手系」か「左手系」かにて注意すべきは、対象が物 体か座標系かという点。座標変換する対象が「物体」か 「座標系」そのものかで、回転方向が反転する。 x x y y z z 左手系 右手系 右手系:右回りを正の回転方向とする。.

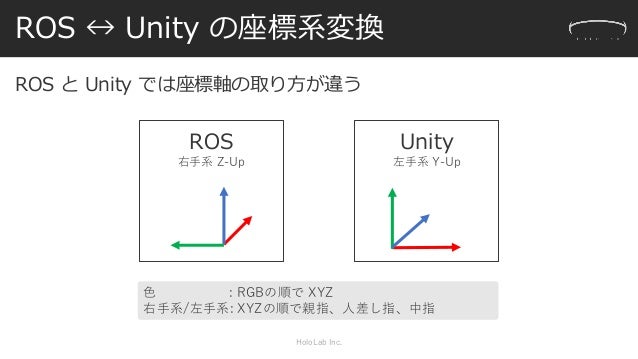
右手系 左手系 変換. Right-handed system )または正系(せいけい、 positive-oriented system )は、線型代数学における座標系で、右手の法則(right-hand rule)に従うものを指し、左手系と区別される。 多くの分野では右手系が標準とされ、左手系は非標準的とされる 。. はじめに ROS と Unity でロボットの座標データをやり取りするときに、 座標系の違いを調べる必要があったのでまとめておきます 座標系について ROS :. 左手系 右手系 (5).
その代わり、 右手系に対して鏡に写す変換 ( 鏡映変換 )を施すと、 左手系に変換される (下図)。. Right-handed system )または正系(せいけい、 positive-oriented system )は、線型代数学における座標系で、右手の法則(right-hand rule)に従うものを指し、左手系と区別される。 多くの分野では右手系が標準とされ、左手系は非標準的とされる 。. 演算子の変換での議論より左手系での演算子の形は { +1 +0 +0 +Ta1 } { +0 +1 +0 +Ta2 } { +0 +0 +1 -Ta3 } { +0 +0 +0 +1 } だから、Tb=(Ta1,Ta2,-Ta3) 回転値(オイラー角)の変換 Ra=(Ra1,Ra2,Ra3)という右手系におけるオイラー角表示が有るとする。.
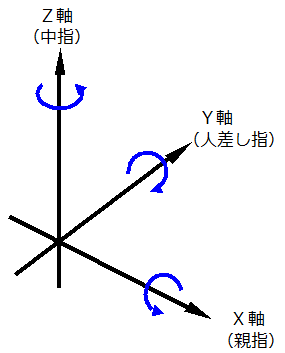
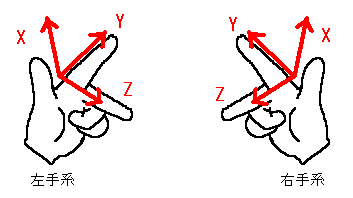
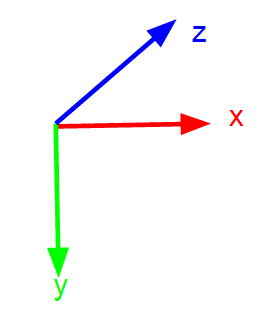
注意 右手の親指,人差指,中指とx,y,z 軸との配置(位置関係)が 同じ場合,右手系という.図A.1 参照.左手系では式(A.13) は異なる 結果になる.以下特に断らない限り,常に右手系で考える. 問A.6 内積の場合に倣って, A B = (Axi+Ayj +Azk) (Bxi+Byj +Bzk). 左手系 Unity と ROS の座標系について 変換方法 Unity -> ROS Position:. SteamVR_Utils.RigidTransformをROS geometry_msgs / Poseに変換することに取り組んでいて、そしてUnity左手座標系をROS右手座標系に変換する必要がありました。.
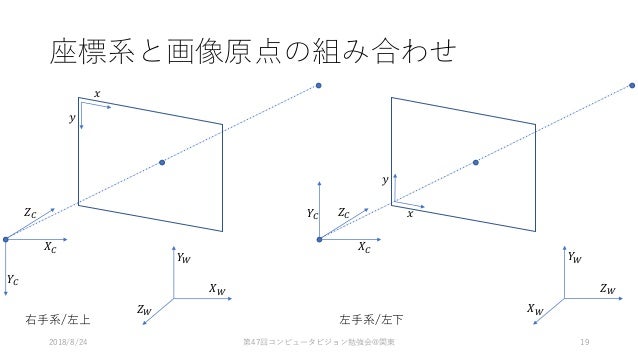
(日) 右手系/左手系の区別をワールド座標/カメラ座標ごとに明記. (土) 視野変換の記号を入力・出力・その他に分類,説明少し追記. (日) 参考・関連図書を追加. (木) 参考・関連図書を追加. (日). ちなみに、右手系を使いたいけどZ軸は奥を向いてほしいということのためだけに「 X 軸. 私は右手系から4x4行列を変更したいと思っています: xは左右、yは前後、zは上下 左利きのシステムに: xは左右、 zは表と裏、 yは上下です。 ベクトルの場合は簡単ですが、yとzの値を入れ替えるだけですが、行列に対してはどのようにしますか?.
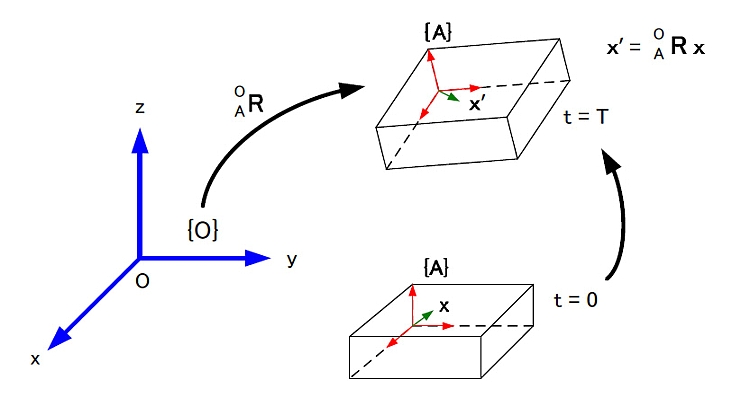
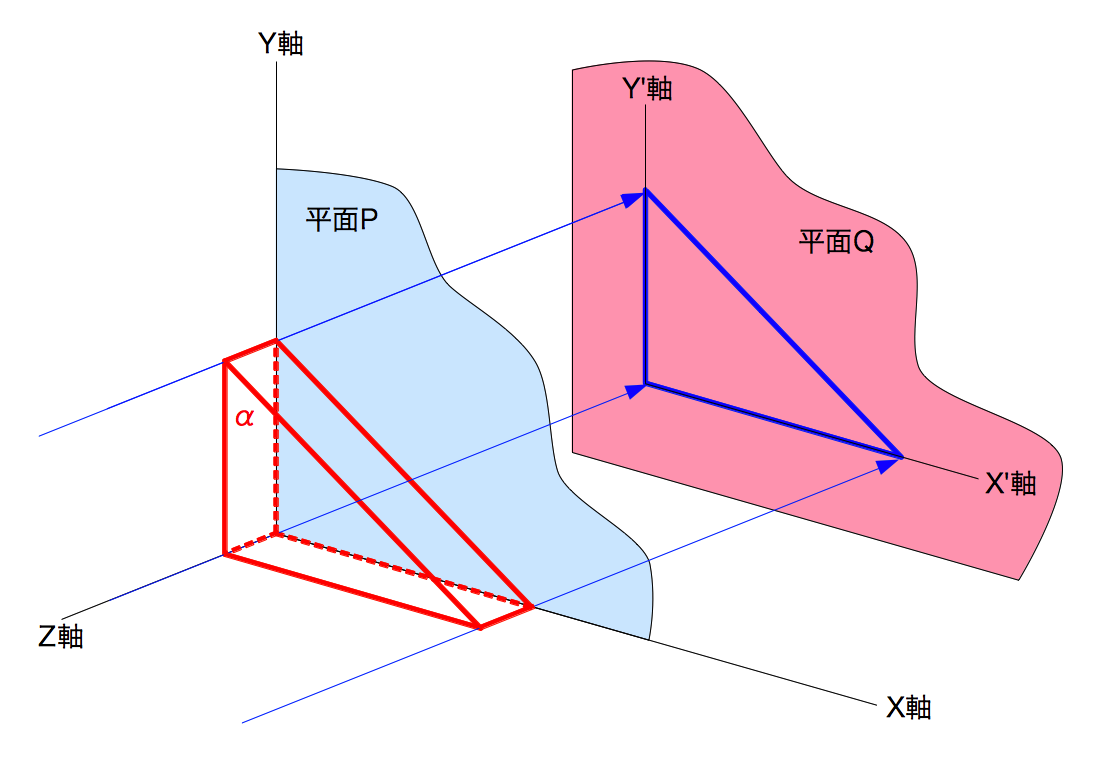
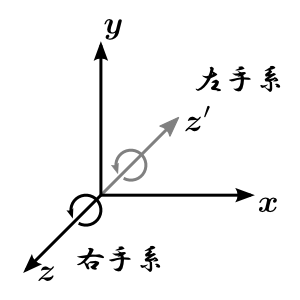
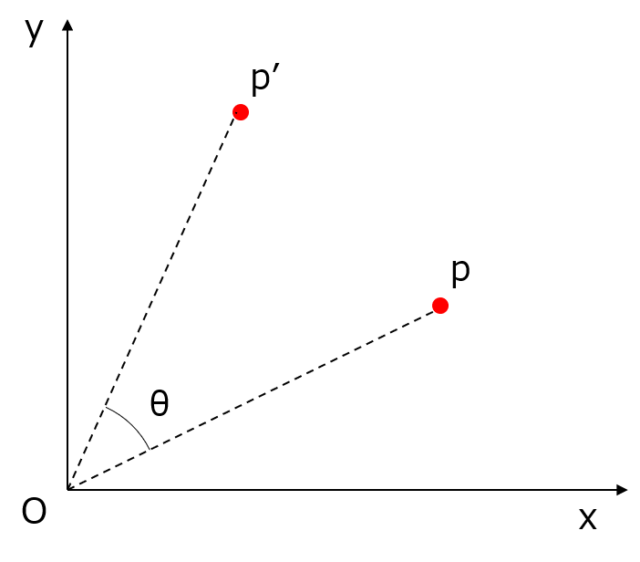
右手系と左手系の変換方法については 冒頭で紹介した記事 を参照してください。 まずは回転ベクトル, 回転行列, クォータニオン, オイラー 角のいずれかからRotation インスタンス を作成します。 これにはRotationクラスの from_* () メソッドを使います。. POV-RayおよびRenderMan(Pixarのレンダリングソフトウェア)も、左手座標系を使用します。 DirectX 9+は両方の座標系で機能します。 WPFとXNA(シーンでDirectXで動作する)はどちらも右手座標系を使用します。 これから、いくつかのことを推測できます。. 科学 - 左手系のオイラー角で説明しているのでしょうか オイラー角の説明で、 z軸まわりにφだけ回転させると、添付図のように (x,y,z)軸は(x',y',z')軸の位置まで運動する。 そしてこの回.
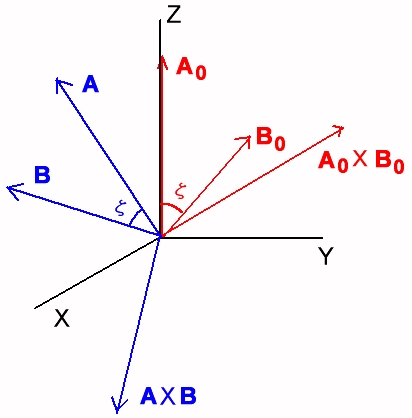
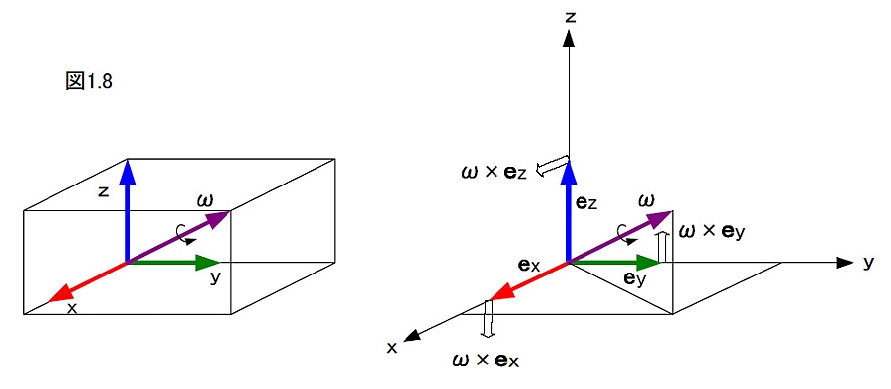
Right-handed system )または正系(せいけい、 positive-oriented system )は、線型代数学における座標系で、右手の法則(right-hand rule)に従うものを指し、左手系と区別される。 多くの分野では右手系が標準とされ、左手系は非標準的とされる 。. 実際に計算すると、 が成り立ち (「 外積の定義 」を参考)、 直感的にも右手系を成すことが分かる (下図)。. 基底ベクトル から成る座標系 {eX,eY,eZ} { e X, e Y, e Z } は右手系を成す。.
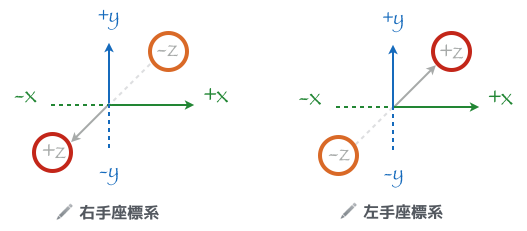
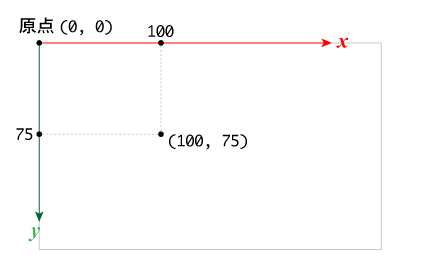
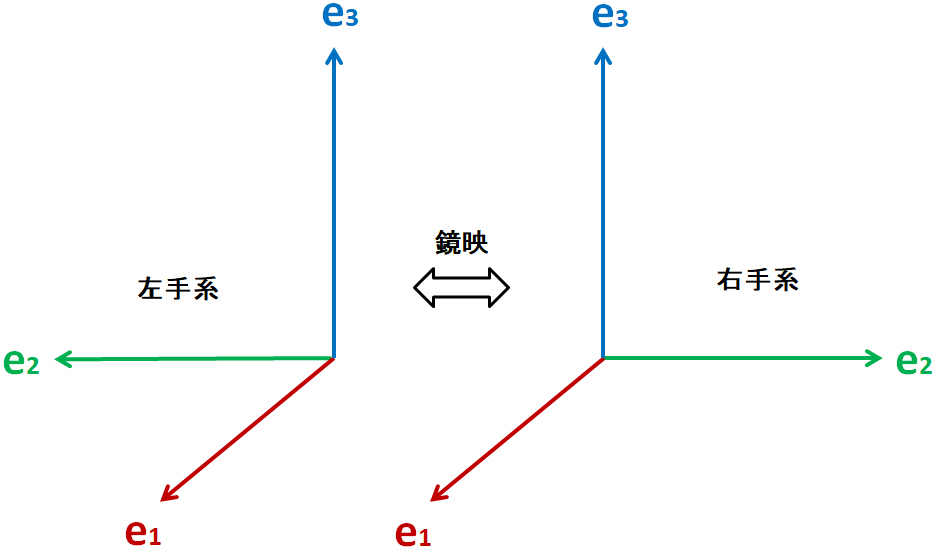
2d 面に 3d を描きたい の軌跡メモ 01。大きさ 100 ( 縦 ) * 0 ( 横 ) * 50 ( 高さ ) の直方体をとりあえず正面から見た時のように描画したいが…。何から始めればいいのやら。 右手系 と 左手系 右手系はワールド座標系、左手系は視点座標系 ( 座標原点に視点を置いた座標系 ) 。. デカルト座標で、上図のように右手系、左手系を区別します。 両者はZ軸を基準に鏡に映すようにして変換することで要素を読み替えることができます。 UnityやUnreal Engineは左手系;. 左図と右図の関係は,ちょうど鏡に映したときの関係になっており,回転や平行移動による座標変換で入れ替えることは出来ないのです.基底ベクトル を,次左図のように取った系を 右手系 ,次右図のように取った系を 左手系 と呼びます..
通常、3D グラフィック アプリケーションでは、2 種類のデカルト座標系、つまり左手系と右手系が使用されます。 Typically 3D graphics applications use one of two types of Cartesian coordinate systems:. ことをいう。通常は右手系の直交座標系が用 いられることから、右手系を正系とも呼ぶ。 極座標系(平面極座標系, 二次元極座標系,円座標系) 円上の点を表すのに便利である。直交座標系から極座標系への変換は 𝑥= 𝑔cos 𝜃, 𝑦= 𝑔sin𝜃. 右手系と左手系は,回転や平行移動による座標変換で入れ替えることは出来ない,ということでしたが, どれか基底の向きを逆にしてしまうような変換で移り変わることができます.たとえば ( x 1 ;x 2 ;x 3 ) ).
標準的な基底は右手系である。 < a1, …, an > が右手系であるとき、その中の2つのベクトルの順序を入れ替えたもの、例えば < a2, a1, a3, …, an > は左手系になる。�. 右手(X, Y Z) → 左手(-X, Y, Z) 姿勢(Quaternion) 右手(X, Y, Z, W) → 左手(-X, Y, Z, -W ) (当然ながら左手から右手への変換も同じです). 右手系と左手系は互いに鏡に映したような関係になっており、お互いの変換は回転変換だけでは対応できない。右手系の座標軸をぐるっと回しても決して左手系にはならないからだ。こういう場合は「鏡像変換」を使う。別に難しい変換ではなくて、 \( x.
座標系といっても右手系から左手系への変換は容易で, z′ = zとすれば良いだけなので, ややこしく考える必要は無い. Double→float の型変換作業が行われることになるので効率が悪い。 1.2f のように,末尾に f を付けると float型の実数値リテラルになるので, DXライブラリ用の. Right{-1.33, 0, 0} を指定すればよい。 詳細は「5.1 座標系の変換」を参照せよ。 座標系内の位置は、通常3成分ベクトルによって指定する。.
4 x 4の行列を右手系から変更したいと思います。. 右手系と左手系 x軸, y軸, z軸の向きによって右⼿系と左⼿系に分けられる 3. Blenderは右手系でZアップ、DirectXは左手系でYアップです。 DXライブラリだとDirectXに属しますので左手系でYアップだと思います。 Blenderのxファイル出力で右手系から左手系に変換する必要があると思います。 「blenderからXファイル - octech」.
Point ベクトルの外積(ベクトル積,クロス積)の注意点について. 座標変換の表式を導く. ベクトルの外積について,こんな性質もあるんだよ!というものをまとめています.性質としては重要なものですが,「計算」ではあまり使わないため忘れてしまいがちかもしれません.ここで紹介. 右手系で取得した回転ベクトルを左手系での表現に直すときは、 向きを反転させた後で 普通のベクトルと同じように変換してやればよいです。 たとえば、右手系で観測した回転ベクトル (u, v, w) はY軸反転した左手系で観測すると (− u, v, − w) になります。. 2.2 座標系の物理的定義 前のページ; 次のページ 座標系(coordinate system)とは、原点(origin)の位置、座標軸(coordinate axes)の向き、長さの単位(unit of length)を決めたものであって、点の位置を、座標(coordinates)で表すようにした系(system)です。.
Right-handed system )または正系(せいけい、 positive-oriented system )は、線型代数学における座標系で、右手の法則(right-hand rule)に従うものを指し、左手系と区別される。. 通常、3D グラフィック アプリケーションでは、2 種類のデカルト座標系、つまり左手系と右手系が使用されます。 Typically 3D graphics applications use one of two types of Cartesian coordinate systems:. OpenCVの座標系 前提of前提 OpenCVで使われる回転の作法 OpenCVでの座標変換計算の数式 rvecやtvecの扱い 検証用投影プログラム OpenCVの座標系 座標系というやつはどう定義されているかが非常に重要です。 従って参照にすべきはQiitaでもなく,このブログでもなく公式APIリファレンスです。.
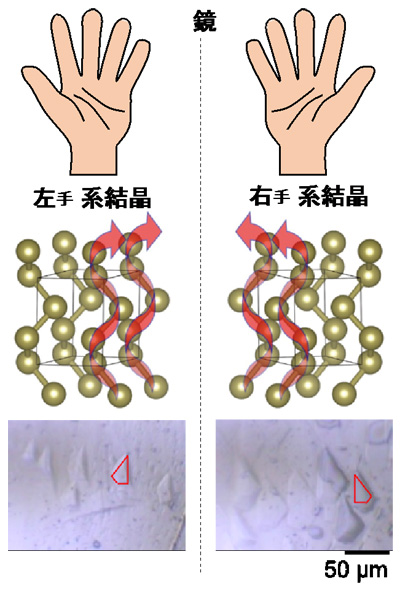
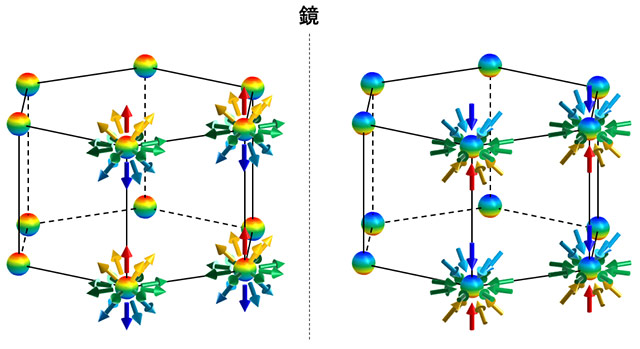
鏡映しの関係にある右手系・左手系結晶では、放射状構造を持つスピンの向きが逆 転することを見出しました。 電流印加や光照射でスピン流を原理的に生成可能なことから、スピントロニクスの 応用に繋がることが期待されます。 3. 3D の計算の基本は同じとは言っても、DirectX と OpenGL の間にはちょっとした違いがあったりします。 DirectX と OpenGL の違いとしてよく挙げられるのが座標系の違いです。よく、左手系とか右手系とか、そんなふうに言われたりします。. X 軸と Y 軸の回転が逆.

3次元cgと座標系

コンピューターグラフィックス基礎のメモ しゅみぷろ
外積代数入門 クロス積 ウェッジ積 テンソル
右手系 左手系 変換 のギャラリー

クォータニオン Quaternion を総整理 三次元物体の回転と姿勢を鮮やかに扱う Qiita

直交座標系 高校物理の備忘録
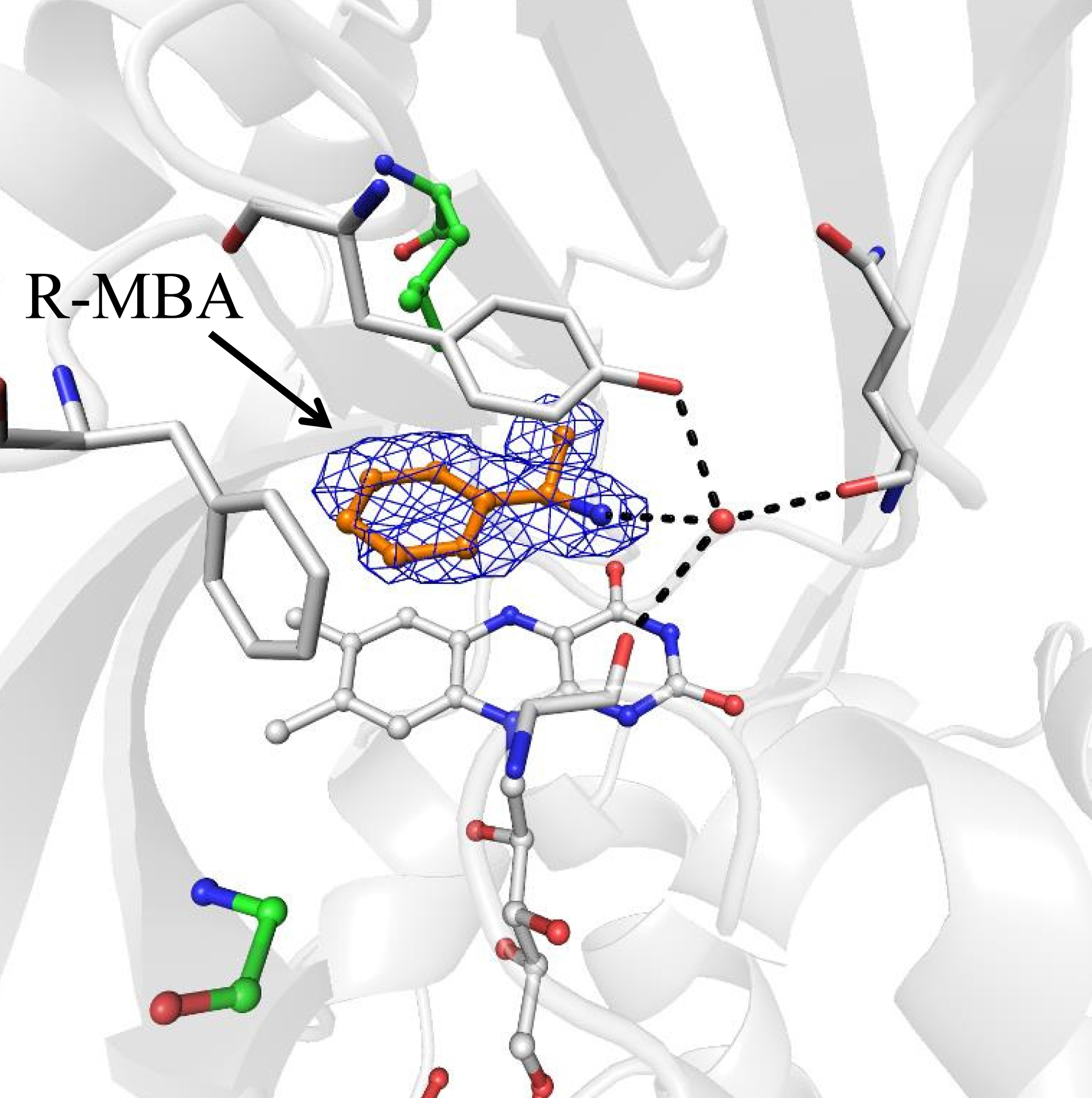
アミン化合物の右手系 R型 のみに作用する酵素を開発 Kek Imss
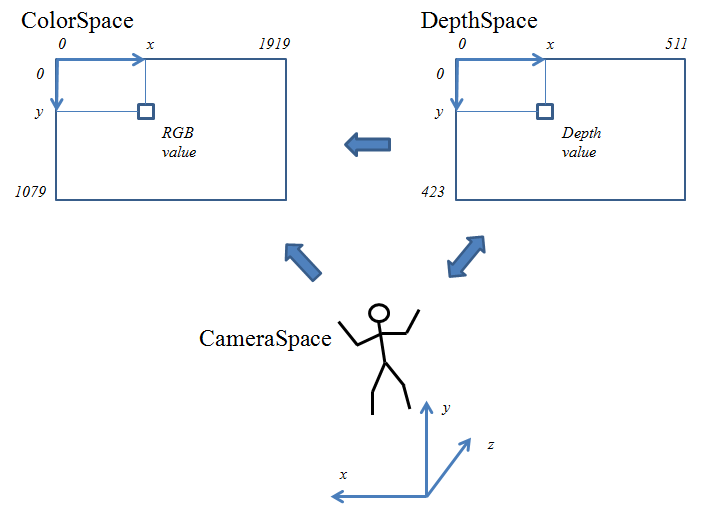
Kinect V2 C Programming With Opencv On Windows10

右手座標系 左手座標系 座標変換 Key Blog

合成したクォータニオンの可視化 いつも空をみていた

Ros と Unity における座標系の違いについて Ykpages
座標変換

3次元計測における物体の姿勢と角度 ノウハウ ノウハウ モーションキャプチャを使った3次元動作分析 測定 アキュイティー

回転ベクトル 回転行列 クォータニオン オイラー角についてまとめてみた かみのメモ
Directxとopenglの射影トランスフォーム行列の違い なたで日記

08 0266号 ストリップ線路型右手 左手系複合線路とそれを用いたアンテナ Astamuse

回転ベクトル 回転行列 クォータニオン オイラー角についてまとめてみた かみのメモ
Q Tbn 3aand9gcrxn2gc K2clgptafl092hytclpetxfehqlbcol4oq5figdip Usqp Cau
電気工学で使う数学的手法 後藤 英雄 電気システム工学科 中部大学
Dai Con Viewer Dai Con Project 大根技術者のi Conプロジェクト室

1 3dグラフィクスの基本 Cinderellaで3d
座標系で右手系と左手系の区別がつきません 分かりやすい区別の仕方 Yahoo 知恵袋

E N ƍ N 自然科学 入門 右手
キラル結晶の右手系 左手系で反転する放射状スピン構造を発見 テック アイ技術情報研究所

座標系 A01 Inertia
運動の幾何学 ラグビーセンサ

3次元cgと座標系

クォータニオン Quaternion を総整理 三次元物体の回転と姿勢を鮮やかに扱う Qiita
外積代数入門 クロス積 ウェッジ積 テンソル
ベクトルと座標計算の基礎

3次元cgと座標系

Catia用語 座標系 Axis とは Liclog
Kantocv 2 1 Calibration Publish
外積代数入門 クロス積 ウェッジ積 テンソル
座標変換について調べてみた Developers Io
Http Www Sic Shibaura It Ac Jp Yaoki Cg Cg08 04 Pdf
2
3dの座標系と座標変換 Gameworks Lab

右手 左手座標系と回転の向き 気まぐれに 3dcg Blender

左手系のオイラー角で説明しているのでしょうか Okwave
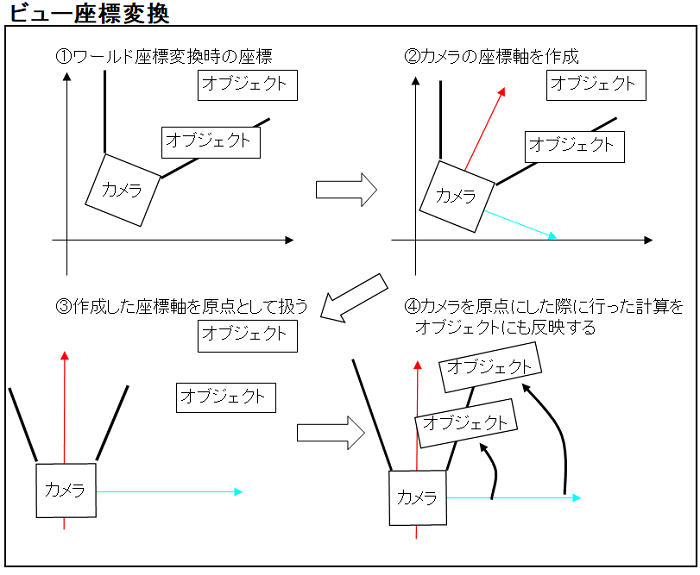
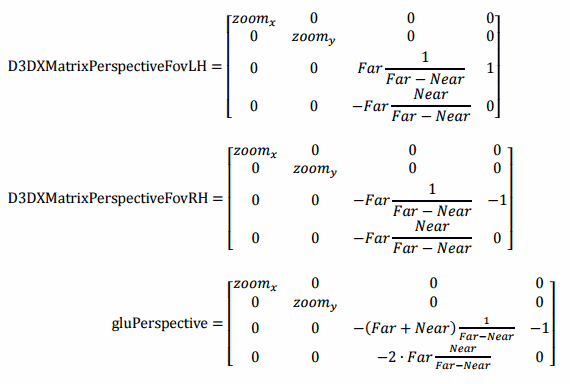
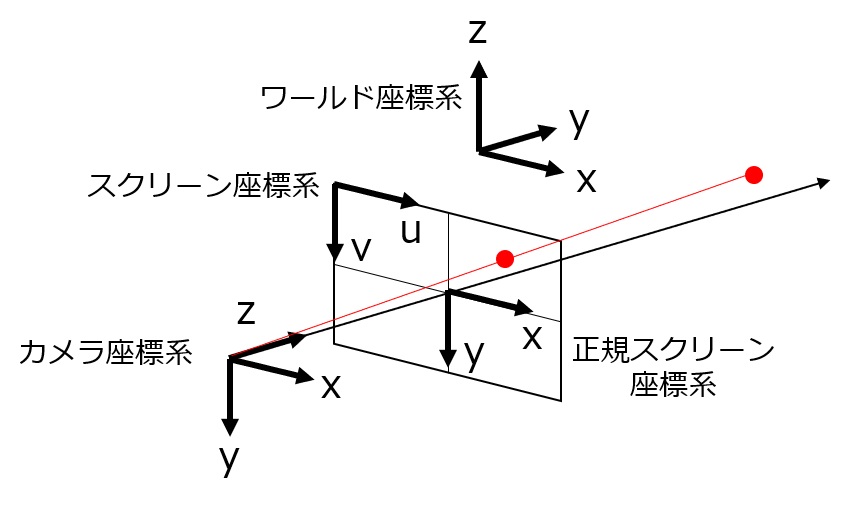
視野変換 射影変換 ワールド座標系 カメラ座標系 画面座標系
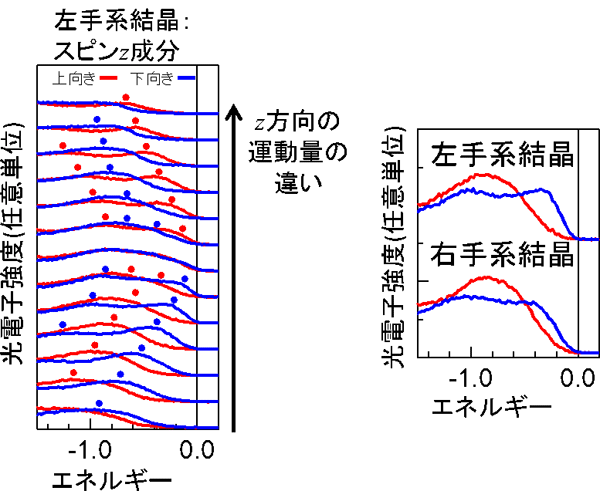
共同発表 キラル結晶の右手系 左手系で反転する放射状スピン構造を発見

16 号 左手座標系対応の数値制御装置 Astamuse
座標変換

3次元cgと座標系
Http Satoh Cs Uec Ac Jp Ja Lecture Computergraphics 3 Pdf
1 1 基本図形
回転行列 拡大縮小行列 平行移動行列 三次元座標の場合 イメージングソリューション
床井研究室 第5回 座標変換
各種ツール ライブラリの座標系 ひまつぶし

座標系 Uwp Applications Microsoft Docs
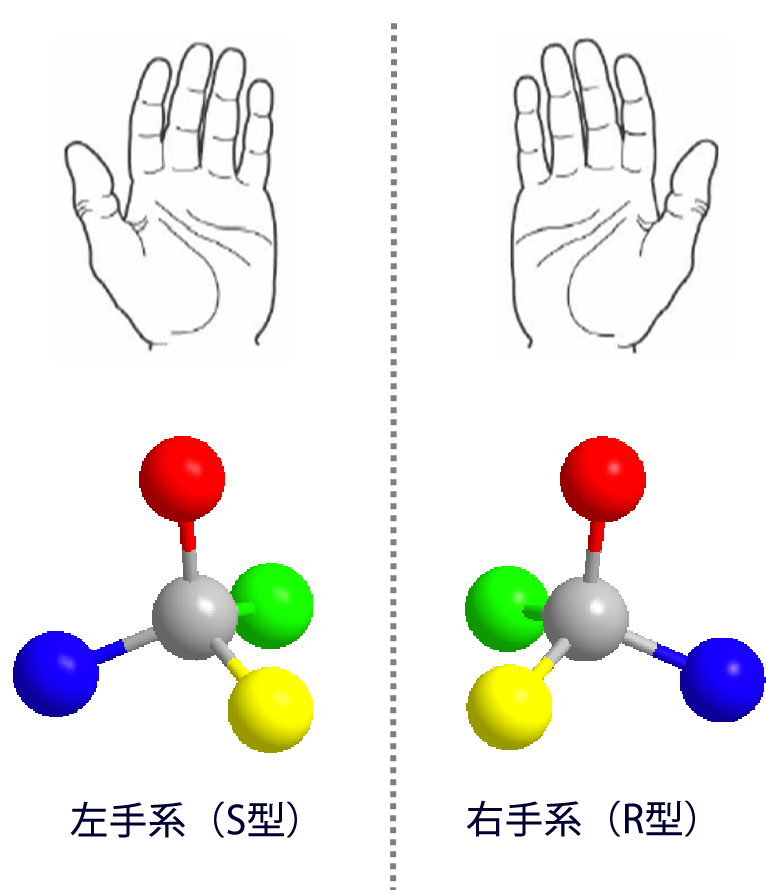
アミン化合物の右手系 R型 のみに作用する酵素を開発 Kek Imss
Q Tbn 3aand9gcrxn2gc K2clgptafl092hytclpetxfehqlbcol4oq5figdip Usqp Cau
Directxとopenglのビュートランスフォーム行列の違い なたで日記

3次元cgと座標系
2
3次元cg
Http Www Iipl Is Ritsumei Ac Jp Member Tomoko Lecture Mediashori Cg Mediacgtext1 Pdf
軸性ベクトルと極性ベクトル 物理のかぎしっぽ
3dモデルの座標変換について a ソーサリーフォース

算譜記録帳 Webglの座標系は右手系なのか左手系なのか
右手系 Japaneseclass Jp
頂点情報とプリミティブ けんごのお屋敷
3次元cg
現実世界コンピューティング Realsense とロボットと Hololens 19 04 24 Intel Realsense J
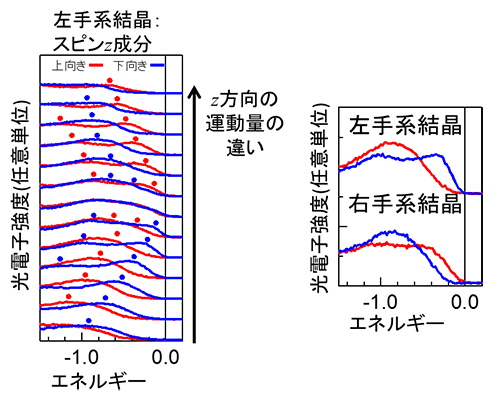
キラル結晶の右手系 左手系で反転する放射状スピン構造を発見 東工大ニュース 東京工業大学
3d座標の右手系と左手系の見分け方を教えてください 親指をx Yahoo 知恵袋
Http Www Iipl Is Ritsumei Ac Jp Member Tomoko Lecture Mediashori Cg Mediacgtext1 Pdf
小ワザ 座標とピクセル Hsp開発wiki

1 3dグラフィクスの基本 Cinderellaで3d

3次元cgと座標系
運動の幾何学 ラグビーセンサ
2
Hb3 Seikyou Ne Jp Home E Yama Zahyouhenkan Spinor Pdf
ワイヤーフレーム法による三次元コンピュータグラフィックス

ベクトルの外積と座標変換 Notes Jp
Welcome To 3dcg Modeling Basic Lecture Note Page
床井研究室 第5回 座標変換
座標変換

算譜記録帳 回転と右手系左手系

1998 7 2 コンピュータグラフィックス資料
点の移動 回転 メモ帳 Fmaj7b5 Info
各種ツール ライブラリの座標系 ひまつぶし
座標変換について調べてみた Developers Io
座標変換について調べてみた Developers Io

経緯度 Wikipedia

今度こそ理解するプロジェクション変換行列のつくりかた びわの家ブログ

中華cncで切削加工 右手系と左手系

ねこ騙し数学
Q Tbn 3aand9gcrxn2gc K2clgptafl092hytclpetxfehqlbcol4oq5figdip Usqp Cau
Http Hooktail Sub Jp Vectoranalysis Axialandpolar Index Pdf
座標変換
座標変換について調べてみた Developers Io
座標変換

3次元座標変換のメモ書き Qiita
キラル結晶の右手系 左手系で反転する放射状スピン構造を発見 東工大ニュース 東京工業大学
ベクトルと座標計算の基礎

右手系 Wikipedia

左手座標系と右手座標系の壁を超えよう Qiita
右手系 左手系とは 理数アラカルト

1 3dグラフィクスの基本 Cinderellaで3d
3次元の回転 原点を通る任意方向回転軸 座標系に依存しないベクトル表現と回転行列
Wgld Org Webgl 3d 描画の基礎知識
Q Tbn 3aand9gcrsas2bwsktu9qc Pkhtso25bpxrs Imajkmq6w4nx58jrbwcuc Usqp Cau
Http Hooktail Sub Jp Vectoranalysis Axialandpolar Index Pdf



